
WSDR毫米波雷达
2024-09-25
产品介绍:
应用领域:
★安防动目标的检测与跟踪;
★非浸入式目标检测;
★目标识别与分类;
检测原理:
功能特点:
✦稳定可靠:本雷达传感器具有多种抗干扰和故障保护功能,能够识别传感器和传感器环境并自动显示。
✦小型化设计:通过使用不太复杂的测量原理的雷达技术以及汽车供应行业的开发和批量生产,保持非常强大坚固和小型化设计。
✦多目标点输出:Cluster每次扫描识别的目标最多为250个,Obiect每次扫描识别的目标最多为100个。
规格参数:
|
测量性能 |
到自然目标(非反射器目标) |
|
|
检测距离 |
|
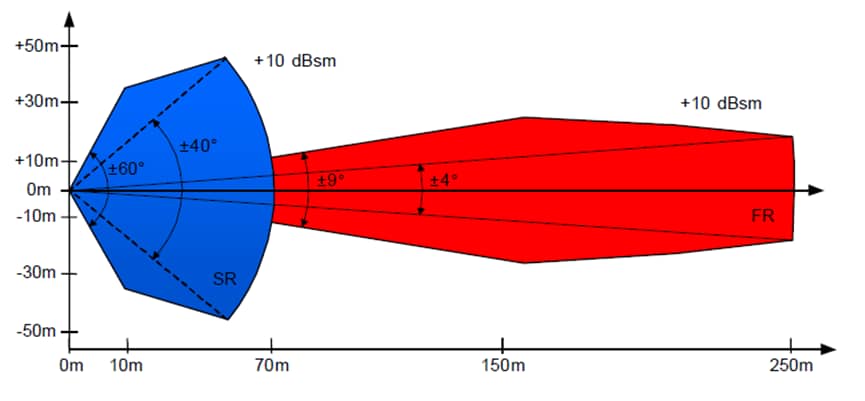
0.20 ...250 m 和 0.20...1000m |
|
0.20...70m/100m@0…±45° 近距 |
||
|
0.20…20m@±60° 近距 |
||
|
距离分辨率 |
Cluster 点目标,无跟踪 |
1.79 m 远距, 0.39 m 近距 |
|
距离精度 |
Cluster 点目标,无跟踪 |
±0.40 m 远距, ±0.10 m 近距 |
|
方位角 |
(水平视野 FoV) |
-9.0°...+9.0° 远距, -60°...+60° 近距 |
|
俯仰角 |
(垂直视野 FoV) |
14° 远距, 20° 近距 |
|
方位角波束宽度(3 dB) |
|
2.2°远距 |
|
4.4°@0° / 6.2°@±45° / 17°@±60° 近距 |
||
|
方位角分辨率 |
Cluster 点目标,无跟踪 |
1.6° 远距, |
|
3.2°@0° / 4.5°@±45° / 12.3°@±60° 近距 |
||
|
方位角精确度 |
Cluster 点目标,无跟踪 |
±0.1° 远距, ±0.3°@0°/ ±1°@±45°/ ±5°@± 60°近距 |
|
测速范围 |
|
-400 km/h...+200 km/h (- 远离...+接近) |
|
速度分辨率 |
目标分离能力 |
0.37 km/h 远距, 0.43 km/h 近距 |
|
速度精确度 |
点目标 |
±0.1 km/h |
|
周期 |
|
大 约 49 ms |
|
天线通道 / 原理 |
平面 |
4TX/2x6RX (4 发 12 收)= 24 个通道 远距 2 发 6 收- 近距 2 发 6 收 /数字波束形成 |
|
操作条件 |
||
|
频段 |
|
76...77 GHz |
|
系统供电 |
12 V DC / 24 V DC |
+8.0 V...32 V DC |
|
功耗 |
12 V DC / 10 A 保险丝 |
6.6 W / 550 mA@典型值 |
|
12 W / 1.0 A @峰值 |
||
|
负载转储保护内部 |
|
>60V 断开连接,并可在电压降为<60V 后重新连接 |
|
操作-/ 存储温度 |
|
-40°C...+85°C / -50°C...+105°C |
|
生命周期 |
|
10000 小时或 10 年 |
|
冲击 |
机械 |
500m/s2@6ms 半正弦波(+/-X/Y/Z 轴方向各 10 次冲击) |
|
振动 |
机械 |
20[(m/s2)2/Hz]@10Hz / 0.14[(m/s2)2/Hz]@1000Hz(峰值) |
|
防护等级 |
ISO 16750 分类 |
IP 69(粉尘、高压冲洗) |
|
IP 67(水下 10cm),冰水冲击试验,耐盐雾 |
||
|
连接 |
||
|
监控功能 |
|
自检(故障安全设计) |
|
接口 |
8 ID |
1 x CAN - 高 速 500 kbit/s |
|
外壳 |
||
|
尺寸/ 重量 |
W * L * H (mm) / (质量) |
138 * 92 * 31 / 约 300 g |
|
材料 |
前壳/ 后盖 |
黑色橡胶 压铸铝 |
|
其他 |
||
|
基于快速斜坡的 FMCW,在一个测量周期内的测量原理为多普勒效应,独立测量目标距离和速度 |
||
|
EYE-Radar-360 |
工业传感器 |
CAN 协议自由通信 |



