
系统方案
全域轨迹跟踪雷达系统
2024-09-25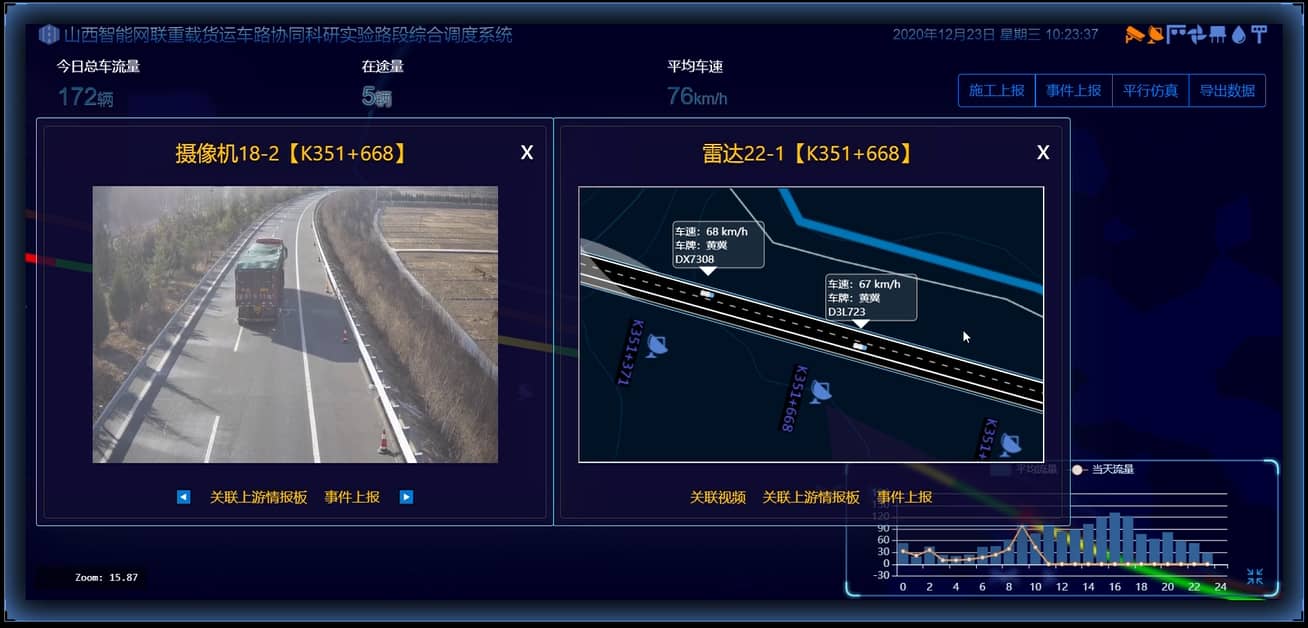
系统介绍:
本系统采用雷达和视频融合的感知技术,利用路侧的毫米波雷达获取精确车辆轨迹,通过轨迹拼接实现全域轨迹跟踪,雷达系统具备目标检测、目标类型识别、车流量统计、车速检测、目标跟踪等能力,通过交通风险识别算法实现风险预警,为交通调度指挥提供决策依据。卡口可采集车辆车牌信息,雷达和视频卡口联动,可有效感知整个路段的交通信息,掌控交通态势。
跟踪检测雷达传感器:
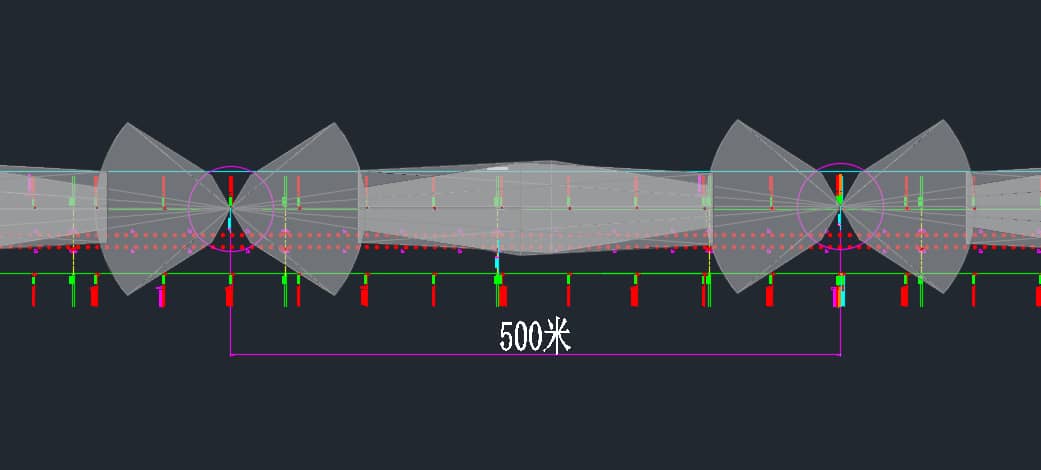
方案1(长距离):间隔350-500米设置立杆,每处立杆设置背靠背广域雷达2套、近距雷达2套。雷达之间匹配拼接段长度为50~100米,实现雷达图像的拼接。方案2(常规):间隔250~350米设置立杆,每处立杆设置背靠背近距雷达2套,雷达之间匹配拼接段长度为50米,实现雷达图像的拼接。在弯道、隧道等位置由于安装高度有限,雷达探测距离受限,布设间距需要加密至150米。
通过对检测范围内的目标物体进行跟踪扫描定位并获取每个目标物体的独立信息,包括:即时速度、运动方向、经纬度、目标尺寸、ID编号、方向角等重要信息。
结合边缘计算服务器:
较大范围探测能力和交通态势感知能力,能将跟踪检测雷达传感器采集到的雷达数据信息结合卡口车辆特征数据信息经边缘计算设备进行快速的本地化汇总分析处理,形成交通数据信息、预警告警信息、车路协同数据信息等上传,支持通过边缘计算设备与多设备的数据交互,实现沿线交通事件的感知;能够根据小型车、中型车、大型车、行人等不同特征而进行识别分类,并能够对其持续跟踪定位;
可在检测区域覆盖的范围内沿途追踪单个车辆及调用沿线视频跟踪,并在数据库中存储,在GIS地图中实时显示其位置、方向、实时车速、车型、经纬度等信息,并可根据车辆沿途点位信息快速定位车辆行驶路径;
系统可通过GIS地图展示道路上车辆实时分布情况、交通状况,为智能车辆提供数据保障;
对于异常事件时可触发沿线视频定位,进行实时控制、联动,实现对异常事件事故车辆、行人的视频定位、跟踪、处理。
异常事件检测功能:可对高速公路上行驶的车辆、行人等进行实时跟踪定位检测并及判断其运动状态和位置信息。具备交通异常事件检测分析功能,检测事件类型包括:车辆停驶、交通事故、车辆拥堵、车辆排队长度、车辆逆行、车辆慢行、行人以及特定区域的非法入侵等;
交通数据采集功能:跟踪检测雷达传感器通过对每一个跟踪目标实时分析可以获取交通数据,有效的反映道路交通状态,采集数据类型包括:车辆流量、平均车辆速度、车头时距等。
系统主要具有以下功能:
01跟踪基于车辆轨迹预测拼接模型的连续车辆轨迹跟踪:基于雷达数据实现车道级精度轨迹感知,基于轨迹预测模型关联多雷达进行轨迹拼接,输出连续车辆轨迹,完成对驾驶行为的全域监控;

02监控
基于驾驶行为的交通行为安全监控:通过分析轨迹数据实现驾驶行为判别,包括停车、慢行、超速、倒车、异常加减速、异常变道等以及断面交通流参数信息感知,包括:流量、速度、占有率等。

03预警
基于交通流参数的交通态势预警:基于轨迹数据提取的交通流参数及异常交通事件的统计分析模型进行交通态势感知及道路风险分级预警。

04识别
车辆轨迹车牌及车重信息识别:通过与卡口系统联动,将每辆车轨迹与车牌号及车重一一对应,并于系统中可视化呈现。

05调度
关联调度系统:雷达系统可实现与交通调度指挥系统的对接,包括数据共享和相互调用,从而基于车路协同技术,完成针对不同高风险行为的实时智能引导管控。

功能优势特点:
1.硬件优势:穿透能力强,不受天气影响:大气对雷达波段的传播具有衰减作用,毫米波雷达无论在洁净空气中还是在雨雾、烟尘、污染中的衰减都弱于红外线、微波等,具有更强的穿透能力。毫米波雷达波束窄、频带宽、分辨率高,在大气窗口频段不受白天和黑夜的影响具有全天候的特点。
体积小巧紧凑,安装简单:毫米波波长短,天线口径小,元器件尺寸小,这使得毫米波雷达系统体积小重量轻,容易安装在任何位置。
识别精度较高:对于相同的物体,毫米波雷达的截面积大、灵敏度较高,可探测和定位小目标。
可实现远距离感知与探测:由于毫米波在大气中衰减弱,所以可以实现超过250M~300M以上距离的移动物体感知与探测。
高频扫描,位置定位精度高:毫米波雷达扫描频率为15HZ,每次扫描识别的目标最多为256个,可实现任意区间的车速过滤,实现士0.1KM/H的车速精度,远场士0.4米,近场士0.1米的位置测量精度,从而实现厘米级车辆定位及速度感知。
分布式计算延时低、稳定性高:基于大规模的分布式计算,系统稳定性高,对网络负载要求低,对中心服务计算性能要求低。单个边缘计算服务器可适配4个雷达,在边端实现数据融合和结构化,降低服务器计算负载及网络延时。
2.软件算法优势
车道级轨迹精度识别:基于毫米波雷达采集的高精度轨迹点,通过轨迹点位匹配复现车辆轨迹,并在GIS地图上实现车辆轨迹可视化呈现。
基于车辆轨迹预测模型的连续车辆轨迹拼接:基于边缘计算机和云端服务器,关联多雷达进行轨迹拼接,输出全路段所有车辆连续轨迹,完成对驾驶行为的全域监控。
车道自适应校准:系统内嵌自学习模块,基于历史交通流数据对车辆轨迹进行聚类,完成车道识别及车道自适应校准。
车牌及车重信息识别:系统可配合调用卡口及动态称重设备实现车辆轨迹数据与车牌及车重信息匹配,从而得到有特殊标签的轨迹数据。
交通事件高准确率预警:基于高精度车辆轨迹,捕捉个体车辆及交通流运行特征信息,实现交通运行风险预警:针对超速,跟车过近,随意变道,急加急减速等高风险交通行为,实现不同等级高风险行为预警。
隧道内稳定识别跟踪:针对隧道内封闭的行车环境,采用自研的去镜像算法实现镜像车辆轨迹擦除,从而实现隧道内行车轨迹稳定识别跟踪。
弯道轨迹稳定识别跟踪:基于自研的分段及单点敏感聚类算法,对轨迹进行分段聚类并基于统计分析模型实现统计学意义上弯道车道识别。
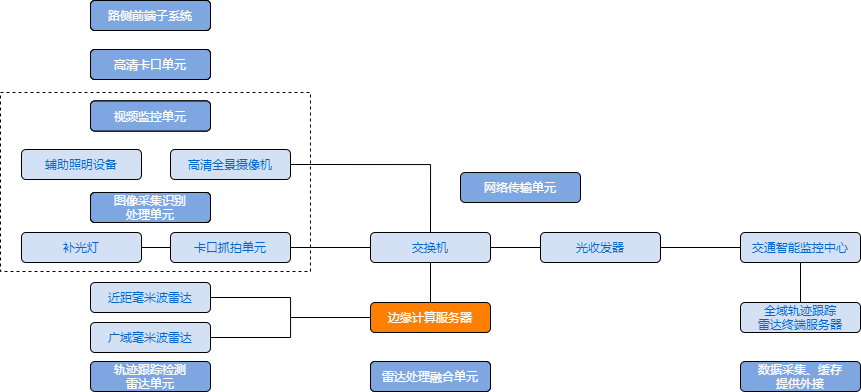
系统拓扑示意



